|
Alex exoskeleton
ALEX SoftwareDocumentation
|
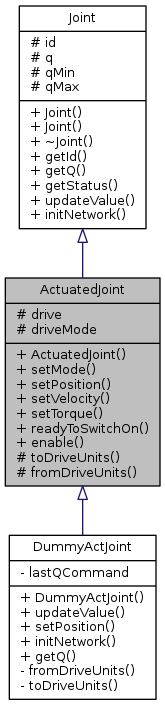
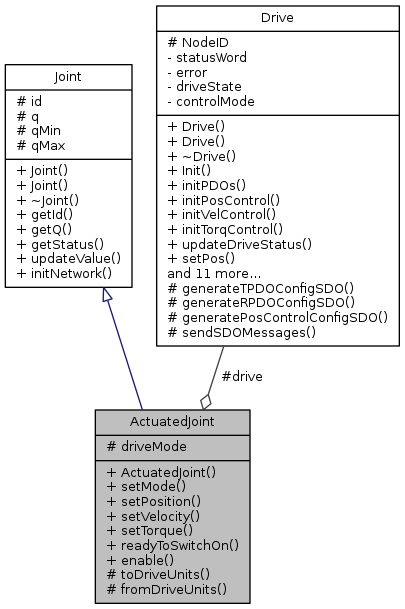
Abstract class representing an actuated joint in a Robot Class (extending joint). Requires a Drive object through which commands are sent. More...
#include <ActuatedJoint.h>
Public Member Functions | |
| ActuatedJoint (int jointID, double jointMin, double jointMax, Drive *drive) | |
| Construct a new Actuated Joint object. More... | |
| virtual ControlMode | setMode (ControlMode driveMode_, motorProfile profile) |
| Set the mode of the device (nominally, position, velocity or torque control) More... | |
| virtual setMovementReturnCode_t | setPosition (double desQ) |
| Set the Position object. More... | |
| virtual setMovementReturnCode_t | setVelocity (double velocity) |
| Sets a velocity set point (in joint units) More... | |
| virtual setMovementReturnCode_t | setTorque (double torque) |
| Set the torque set point. More... | |
| virtual void | readyToSwitchOn () |
| Set the joint ready to switch On. More... | |
| bool | enable () |
| Enable the joint. More... | |
 Public Member Functions inherited from Joint Public Member Functions inherited from Joint | |
| Joint (int jointID, double jointMin, double jointMax) | |
| Construct a new Joint object. More... | |
| Joint (int jointID, double jointMin, double jointMax, double q0) | |
| Construct a new Joint object with initial value for the joint. More... | |
| ~Joint () | |
| Destroy the Joint object. More... | |
| int | getId () |
| Get the Id object. More... | |
| double | getQ () |
| Returns the internal value of the joint (e.g. Angle, length, depending on joint type) More... | |
| void | getStatus () |
| prints out the status of the joints current position in degrees More... | |
| virtual bool | updateValue ()=0 |
| Updates the value of the joint. This will read the value from hardware, and update the software's current representation of the value. More... | |
| virtual bool | initNetwork ()=0 |
| Pure virtual function for initialising the underlying CANopen Network to send and recieve PDO messages for this joint. More... | |
Protected Member Functions | |
| virtual int | toDriveUnits (double jointValue)=0 |
| Converts from the joint value to the equivalent value for the drive. More... | |
| virtual double | fromDriveUnits (int driveValue)=0 |
| Converts from the drive value to the equivalent value for the joint. More... | |
Protected Attributes | |
| Drive * | drive |
| Contains a Drive object, which is a CANOpen device which is used to control the physical hardware. More... | |
| ControlMode | driveMode = UNCONFIGURED |
| The current mode of the drive. More... | |
| Protected Attributes inherited from Joint | |
| const int | id |
| double | q |
| const double | qMin |
| const double | qMax |
Abstract class representing an actuated joint in a Robot Class (extending joint). Requires a Drive object through which commands are sent.
Definition at line 32 of file ActuatedJoint.h.
| ActuatedJoint::ActuatedJoint | ( | int | jointID, |
| double | jointMin, | ||
| double | jointMax, | ||
| Drive * | drive | ||
| ) |
Construct a new Actuated Joint object.
| jointID | Unique ID representing the joint (not checked in this class) |
| jointMin | Minimum allowable value for the joint |
| jointMax | Maximum allowable value for the joint |
The ActuatedJoint class is a abstract class which represents a joint in a Robot objec. This class implements the Joint class, and specifically represents a joint which is actuated. This therefore requires a Drive object which will be used to interact with the physical hardware.
Version 0.1 Date: 09/04/2020
Definition at line 16 of file ActuatedJoint.cpp.
| bool ActuatedJoint::enable | ( | ) |
Enable the joint.
Definition at line 61 of file ActuatedJoint.cpp.
|
protectedpure virtual |
Converts from the drive value to the equivalent value for the joint.
Notes:
| driveValue | The drive value to be converted |
Implemented in DummyActJoint.
|
virtual |
Set the joint ready to switch On.
Definition at line 57 of file ActuatedJoint.cpp.
|
virtual |
Set the mode of the device (nominally, position, velocity or torque control)
| driveMode | The mode to be used if possible |
| motorProfile | variables for desired mode, e.g. postion: v,a and deceleration. |
Definition at line 20 of file ActuatedJoint.cpp.
|
virtual |
Set the Position object.
| desQ | The desired set position |
Reimplemented in DummyActJoint.
Definition at line 31 of file ActuatedJoint.cpp.
|
virtual |
Set the torque set point.
| torque | The desired set position |
Definition at line 52 of file ActuatedJoint.cpp.
|
virtual |
Sets a velocity set point (in joint units)
| velocity | The desired set position |
Definition at line 42 of file ActuatedJoint.cpp.
|
protectedpure virtual |
Converts from the joint value to the equivalent value for the drive.
Notes:
| jointValue | The joint value to be converted |
Implemented in DummyActJoint.
|
protected |
Contains a Drive object, which is a CANOpen device which is used to control the physical hardware.
Definition at line 39 of file ActuatedJoint.h.
|
protected |
The current mode of the drive.
Definition at line 45 of file ActuatedJoint.h.
 1.8.11
1.8.11

