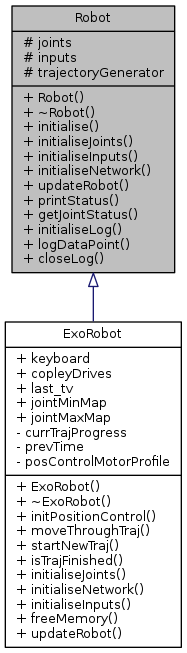
Abstract Class representing a robot. Includes vectors of Joint and InputDevice.
More...
#include <Robot.h>
|
| | Robot (TrajectoryGenerator *tj) |
| | Default Robot constructor. More...
|
| |
| | ~Robot () |
| |
| bool | initialise () |
| | Initialize memory for the designed Robot classes specific Joint objects + sensors (if available) using the pure virtual initialiseJoints() implemented by the robot designer. Based on the given Joints, initNetwork() will configure these joints for CAN PDO messaging and Load the specififed Controller, by default set to Positio. More...
|
| |
| virtual bool | initialiseJoints ()=0 |
| | Pure Virtual function, implemeted by robot designer with specified number of each concrete joint classes for the robot hardware desired. More...
|
| |
| virtual bool | initialiseInputs ()=0 |
| | Pure Virtual function, implemeted by robot designer with specified number of each concrete input classes for the robot hardware desired. More...
|
| |
| virtual bool | initialiseNetwork ()=0 |
| | For each <class>Joint</class> in the robots joints Vector. Individually set up the underlying CANopen PDO messaging to and from the hardware attached. More...
|
| |
| virtual void | updateRobot () |
| | Update all of this Robot software joint positions from object dictionary entries. More...
|
| |
| void | printStatus () |
| | print out status of robot and all of its joints More...
|
| |
| void | getJointStatus (int J_i) |
| | print out status of Joint J_i More...
|
| |
| void | initialiseLog () |
| | Initialises Logging to specified file. More...
|
| |
| void | logDataPoint (std::string data) |
| | Log input data point to currently open log file. More...
|
| |
| bool | closeLog () |
| | Save and close any currently open logging files. More...
|
| |
|
| vector< Joint * > | joints |
| | Vector of pointers to Abstract <class>Joint<class> Objects, number and type must be specified by Software design in <class>Robot<class> Implementation. Note: Use pointers to the joint objects here, so that the derived objects are not cast to Joint, truncating any of their explicit implementations. More...
|
| |
| vector< InputDevice * > | inputs |
| |
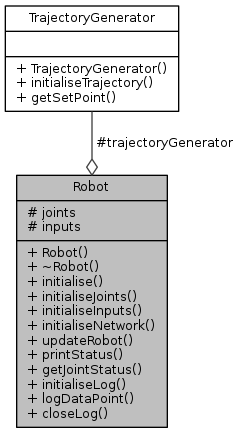
| TrajectoryGenerator * | trajectoryGenerator |
| | Trajectory Generator. More...
|
| |
Abstract Class representing a robot. Includes vectors of Joint and InputDevice.
Definition at line 28 of file Robot.h.
Save and close any currently open logging files.
| void Robot::getJointStatus |
( |
int |
J_i | ) |
|
| bool Robot::initialise |
( |
| ) |
|
Initialize memory for the designed Robot classes specific Joint objects + sensors (if available) using the pure virtual initialiseJoints() implemented by the robot designer. Based on the given Joints, initNetwork() will configure these joints for CAN PDO messaging and Load the specififed Controller, by default set to Positio.
- Returns
- true
-
false
Definition at line 24 of file Robot.cpp.
| virtual bool Robot::initialiseInputs |
( |
| ) |
|
|
pure virtual |
Pure Virtual function, implemeted by robot designer with specified number of each concrete input classes for the robot hardware desired.
Implemented in ExoRobot.
| virtual bool Robot::initialiseJoints |
( |
| ) |
|
|
pure virtual |
Pure Virtual function, implemeted by robot designer with specified number of each concrete joint classes for the robot hardware desired.
Implemented in ExoRobot.
| void Robot::initialiseLog |
( |
| ) |
|
Initialises Logging to specified file.
| virtual bool Robot::initialiseNetwork |
( |
| ) |
|
|
pure virtual |
For each <class>Joint</class> in the robots joints Vector. Individually set up the underlying CANopen PDO messaging to and from the hardware attached.
- Returns
- true
-
false
Implemented in ExoRobot.
| void Robot::logDataPoint |
( |
std::string |
data | ) |
|
Log input data point to currently open log file.
| void Robot::printStatus |
( |
| ) |
|
print out status of robot and all of its joints
Definition at line 44 of file Robot.cpp.
| void Robot::updateRobot |
( |
| ) |
|
|
virtual |
Update all of this Robot software joint positions from object dictionary entries.
Reimplemented in ExoRobot.
Definition at line 37 of file Robot.cpp.
| vector<Joint *> Robot::joints |
|
protected |
Vector of pointers to Abstract <class>Joint<class> Objects, number and type must be specified by Software design in <class>Robot<class> Implementation. Note: Use pointers to the joint objects here, so that the derived objects are not cast to Joint, truncating any of their explicit implementations.
Definition at line 37 of file Robot.h.
Trajectory Generator.
Definition at line 44 of file Robot.h.
The documentation for this class was generated from the following files:
 1.8.11
1.8.11

