|
Alex exoskeleton
ALEX SoftwareDocumentation
|
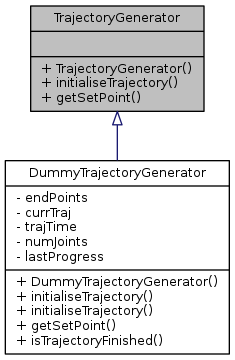
Abstract class which is used to generate trajectorys for a Robot to follow. More...
#include <TrajectoryGenerator.h>
Public Member Functions | |
| TrajectoryGenerator () | |
| virtual bool | initialiseTrajectory ()=0 |
| Pure Virtual Function which must be configured to configure the trajectory generator with the appropriate parameters. Likely to be overloaded. More... | |
| virtual std::vector< double > | getSetPoint (double time)=0 |
| Get the next step point in the trajectory. More... | |
Abstract class which is used to generate trajectorys for a Robot to follow.
Definition at line 22 of file TrajectoryGenerator.h.
| TrajectoryGenerator::TrajectoryGenerator | ( | ) |
Definition at line 14 of file TrajectoryGenerator.cpp.
|
pure virtual |
Get the next step point in the trajectory.
| time | The time corresponding to the point. |
Implemented in DummyTrajectoryGenerator.
|
pure virtual |
Pure Virtual Function which must be configured to configure the trajectory generator with the appropriate parameters. Likely to be overloaded.
Implemented in DummyTrajectoryGenerator.
 1.8.11
1.8.11

