|
Alex exoskeleton
ALEX SoftwareDocumentation
|
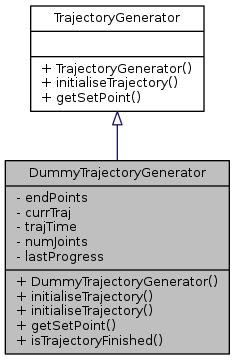
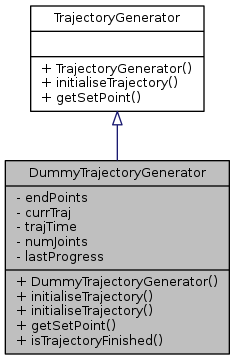
Example Implementation of TrajectoryGenerator. Includes only two trajectories (Sit-to-Stand and Stand-to-sit) for an Exoskeleton. More...
#include <DummyTrajectoryGenerator.h>
Public Member Functions | |
| DummyTrajectoryGenerator (int NumOfJoints) | |
| bool | initialiseTrajectory () |
| Implementation of the initialiseTrajectory method in TrajectoryGenerator. More... | |
| bool | initialiseTrajectory (Trajectory traj, double time) |
| std::vector< double > | getSetPoint (double time) |
| Implementation of the getSetPoint method in TrajectoryGenerator. More... | |
| bool | isTrajectoryFinished () |
| Check if the trajectory has been completed based on last elapsed time. More... | |
 Public Member Functions inherited from TrajectoryGenerator Public Member Functions inherited from TrajectoryGenerator | |
| TrajectoryGenerator () | |
Private Attributes | |
| std::vector< double[2]> | endPoints |
| Trajectory | currTraj = SIT |
| double | trajTime = 2 |
| int | numJoints = 6 |
| double | lastProgress = 0 |
Example Implementation of TrajectoryGenerator. Includes only two trajectories (Sit-to-Stand and Stand-to-sit) for an Exoskeleton.
Definition at line 35 of file DummyTrajectoryGenerator.h.
| DummyTrajectoryGenerator::DummyTrajectoryGenerator | ( | int | NumOfJoints | ) |
Definition at line 17 of file DummyTrajectoryGenerator.cpp.
|
virtual |
Implementation of the getSetPoint method in TrajectoryGenerator.
| time | The time corresponding to the point. |
Implements TrajectoryGenerator.
Definition at line 43 of file DummyTrajectoryGenerator.cpp.
|
virtual |
Implementation of the initialiseTrajectory method in TrajectoryGenerator.
Implements TrajectoryGenerator.
Definition at line 21 of file DummyTrajectoryGenerator.cpp.
| bool DummyTrajectoryGenerator::initialiseTrajectory | ( | Trajectory | traj, |
| double | time | ||
| ) |
Definition at line 31 of file DummyTrajectoryGenerator.cpp.
| bool DummyTrajectoryGenerator::isTrajectoryFinished | ( | ) |
Check if the trajectory has been completed based on last elapsed time.
Definition at line 68 of file DummyTrajectoryGenerator.cpp.
|
private |
Definition at line 38 of file DummyTrajectoryGenerator.h.
|
private |
Definition at line 37 of file DummyTrajectoryGenerator.h.
|
private |
Definition at line 41 of file DummyTrajectoryGenerator.h.
|
private |
Definition at line 40 of file DummyTrajectoryGenerator.h.
|
private |
Definition at line 39 of file DummyTrajectoryGenerator.h.
 1.8.11
1.8.11

