|
Alex exoskeleton
ALEX SoftwareDocumentation
|
A trajectory generator to be used for testing purposes. More...
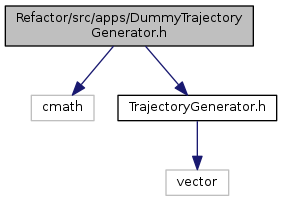
Go to the source code of this file.
Classes | |
| class | DummyTrajectoryGenerator |
| Example Implementation of TrajectoryGenerator. Includes only two trajectories (Sit-to-Stand and Stand-to-sit) for an Exoskeleton. More... | |
Macros | |
| #define | deg2rad(deg) ((deg)*M_PI / 180.0) |
| #define | rad2deg(rad) ((rad)*180.0 / M_PI) |
Enumerations | |
| enum | Trajectory { SIT = 0, STAND = 1 } |
| Enum containing possible trajectory types for DummyTrajectoryGenerator. More... | |
A trajectory generator to be used for testing purposes.
Definition in file DummyTrajectoryGenerator.h.
| #define deg2rad | ( | deg | ) | ((deg)*M_PI / 180.0) |
Definition at line 19 of file DummyTrajectoryGenerator.h.
| #define rad2deg | ( | rad | ) | ((rad)*180.0 / M_PI) |
Definition at line 20 of file DummyTrajectoryGenerator.h.
| enum Trajectory |
Enum containing possible trajectory types for DummyTrajectoryGenerator.
| Enumerator | |
|---|---|
| SIT | |
| STAND | |
Definition at line 26 of file DummyTrajectoryGenerator.h.
 1.8.11
1.8.11

