|
| | Joint (int jointID, double jointMin, double jointMax) |
| | Construct a new Joint object. More...
|
| |
| | Joint (int jointID, double jointMin, double jointMax, double q0) |
| | Construct a new Joint object with initial value for the joint. More...
|
| |
| | ~Joint () |
| | Destroy the Joint object. More...
|
| |
| int | getId () |
| | Get the Id object. More...
|
| |
| double | getQ () |
| | Returns the internal value of the joint (e.g. Angle, length, depending on joint type) More...
|
| |
| void | getStatus () |
| | prints out the status of the joints current position in degrees More...
|
| |
| virtual bool | updateValue ()=0 |
| | Updates the value of the joint. This will read the value from hardware, and update the software's current representation of the value. More...
|
| |
| virtual bool | initNetwork ()=0 |
| | Pure virtual function for initialising the underlying CANopen Network to send and recieve PDO messages for this joint. More...
|
| |
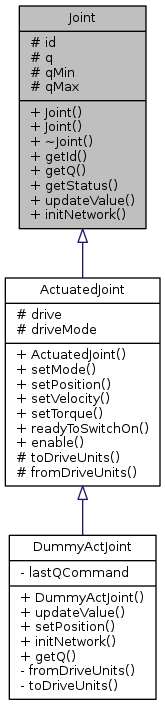
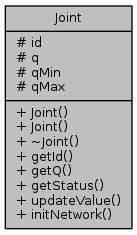
Abstract class representing any joints within a Robot.
The Joint class is a abstract class which represents a joint in a Robot objec. This class can be used to represent all types of joints, including actuated, non-actuated, revolute, prismatic, etc.
Version 0.1 Date: 07/04/2020
Definition at line 19 of file Joint.h.
| Joint::Joint |
( |
int |
jointID, |
|
|
double |
jointMin, |
|
|
double |
jointMax |
|
) |
| |
Construct a new Joint object.
- Parameters
-
| jointID | The joint ID for this object |
| jointMin | The minimum allowable value for this joint (below this will cause an error) |
| jointMax | The maximum allowable value for this joint (above this will cause an error) |
The Joint class is a abstract class which represents a joint in a Robot objec. This class can be used to represent all types of joints, including actuated, non-actuated, revolute, prismatic, etc.
Version 0.1 Date: 07/04/2020
Definition at line 16 of file Joint.cpp.
 1.8.11
1.8.11

