|
Alex exoskeleton
ALEX SoftwareDocumentation
|
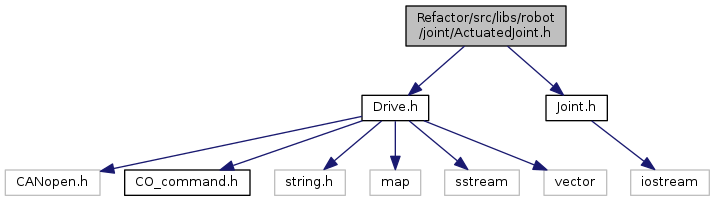
Go to the source code of this file.
Classes | |
| class | ActuatedJoint |
| Abstract class representing an actuated joint in a Robot Class (extending joint). Requires a Drive object through which commands are sent. More... | |
Enumerations | |
| enum | setMovementReturnCode_t { SUCCESS = 1, OUTSIDE_LIMITS = -1, INCORRECT_MODE = -2, UNKNOWN_ERROR = -100 } |
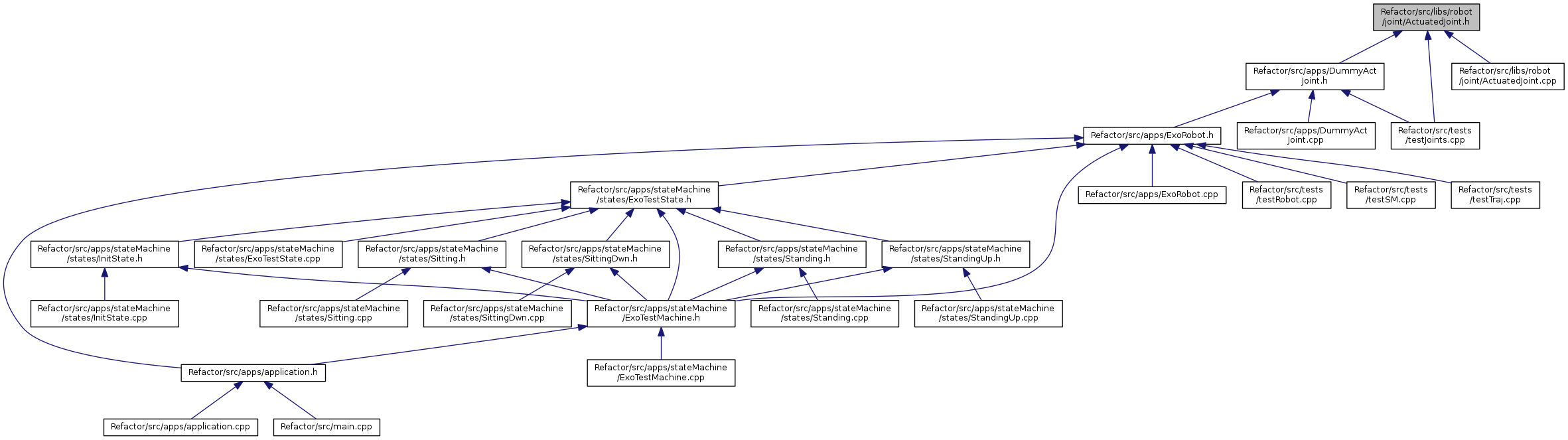
The ActuatedJoint class is a abstract class which represents a joint in a Robot objec. This class implements the Joint class, and specifically represents a joint which is actuated. This therefore requires a Drive object which will be used to interact with the physical hardware.
Version 0.1 Date: 07/04/2020 The setMovementReturnCode_t is used to determine whether the movement was a success, or whether an error occurred in its application.
| Enumerator | |
|---|---|
| SUCCESS | |
| OUTSIDE_LIMITS | |
| INCORRECT_MODE | |
| UNKNOWN_ERROR | |
Definition at line 21 of file ActuatedJoint.h.
 1.8.11
1.8.11

