|
Alex exoskeleton
ALEX SoftwareDocumentation
|
Directories | |
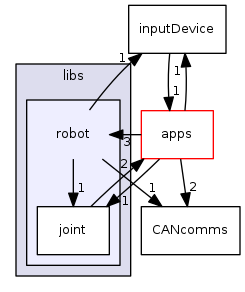
| directory | joint |
Files | |
| file | Drive.cpp [code] |
| file | Drive.h [code] |
| file | Robot.cpp [code] |
| Generic Abstract Robot class, which includes joints and a trajectory generator, to be used with a CAN-based robot device. | |
| file | Robot.h [code] |
| file | TrajectoryGenerator.cpp [code] |
| Base class of Trajectory Generator. Will always be extended with specific implementations. | |
| file | TrajectoryGenerator.h [code] |
| Base class of Trajectory Generator. Will always be extended with specific implementations, and is relatively scarce, given the differences expected in the different trajectories. | |
 1.8.11
1.8.11

