|
Alex exoskeleton
ALEX SoftwareDocumentation
|
Tests for the Joint, ActuatedJoint, ExoJoint and Drive classes. More...
#include <iostream>#include "ActuatedJoint.h"#include "CANopen.h"#include "CopleyDrive.h"#include "Drive.h"#include "DummyActJoint.h"#include "Joint.h"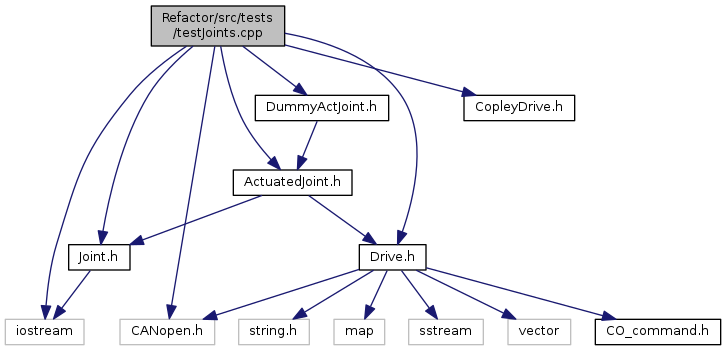
Go to the source code of this file.
Functions | |
| void | CO_errExit (char *msg) |
| void | CO_error (const uint32_t info) |
| int | main () |
Variables | |
| pthread_mutex_t | CO_CAN_VALID_mtx = PTHREAD_MUTEX_INITIALIZER |
| volatile uint32_t | CO_timer1ms = 0U |
Tests for the Joint, ActuatedJoint, ExoJoint and Drive classes.
Definition in file testJoints.cpp.
| void CO_errExit | ( | char * | msg | ) |
Definition at line 25 of file testJoints.cpp.
| void CO_error | ( | const uint32_t | info | ) |
Definition at line 31 of file testJoints.cpp.
| int main | ( | void | ) |
Definition at line 36 of file testJoints.cpp.
| pthread_mutex_t CO_CAN_VALID_mtx = PTHREAD_MUTEX_INITIALIZER |
Mutex is locked, when CAN is not valid (configuration state). May be used from other threads. RT threads may use CO->CANmodule[0]->CANnormal instead.
Definition at line 21 of file testJoints.cpp.
| volatile uint32_t CO_timer1ms = 0U |
Global variable increments each millisecond
Definition at line 22 of file testJoints.cpp.
 1.8.11
1.8.11

