|
Alex exoskeleton
ALEX SoftwareDocumentation
|
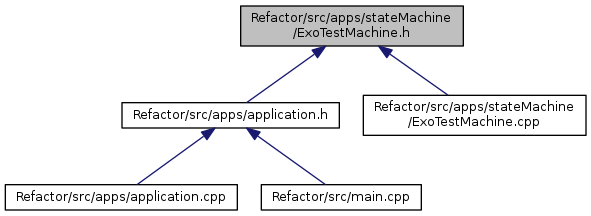
#include <sys/time.h>#include <array>#include <cmath>#include <fstream>#include <iostream>#include <string>#include "ExoRobot.h"#include "ExoTestState.h"#include "StateMachine.h"#include "InitState.h"#include "Sitting.h"#include "SittingDwn.h"#include "Standing.h"#include "StandingUp.h"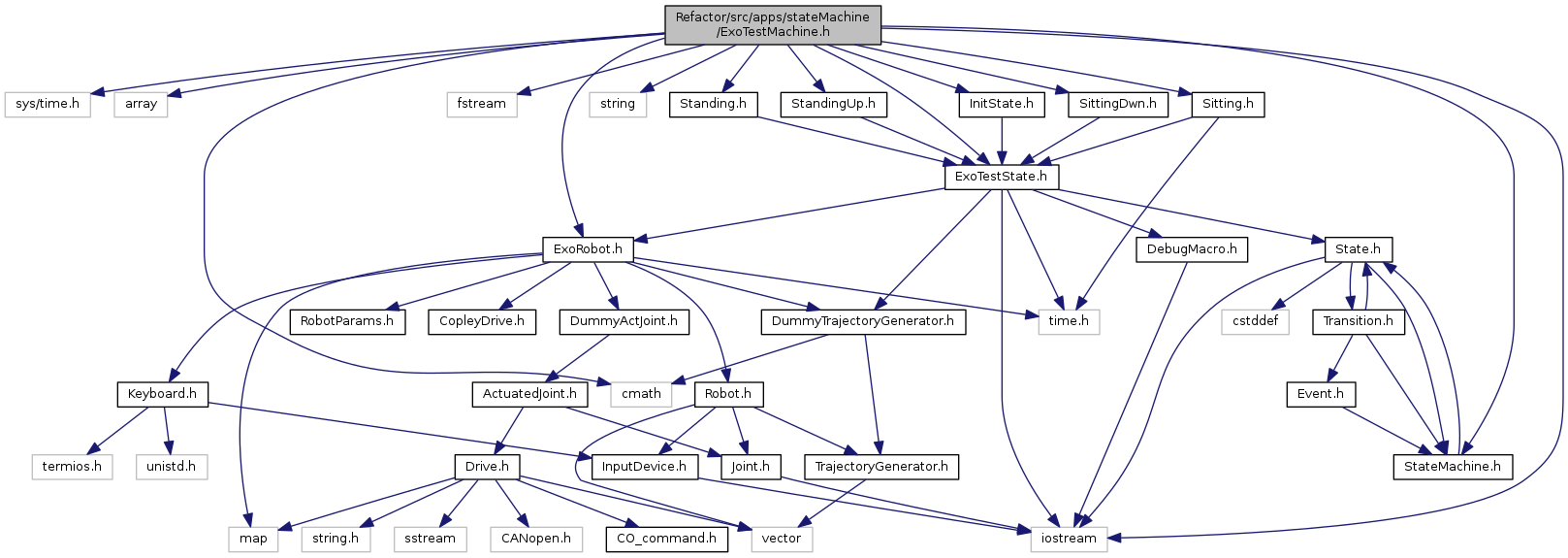
Go to the source code of this file.
Variables | |
| *brief The< code > ExoTestMachine</code > class represents an example implementation of an exoskeleton state machine *with five states | Initialisation |
| *brief The< code > ExoTestMachine</code > class represents an example implementation of an exoskeleton state machine *with five states | sitting |
| *brief The< code > ExoTestMachine</code > class represents an example implementation of an exoskeleton state machine *with five states | standing |
| * brief The<code> ExoTestMachine</code> class represents an example implementation of an exoskeleton state machine* with five states Initialisation |
Definition at line 8 of file ExoTestMachine.h.
| * brief The<code> ExoTestMachine</code> class represents an example implementation of an exoskeleton state machine* with five states sitting |
Definition at line 8 of file ExoTestMachine.h.
| * brief The<code> ExoTestMachine</code> class represents an example implementation of an exoskeleton state machine* with five states standing |
Definition at line 8 of file ExoTestMachine.h.
 1.8.11
1.8.11

