|
Alex exoskeleton
ALEX SoftwareDocumentation
|
#include <errno.h>#include <fcntl.h>#include <linux/reboot.h>#include <net/if.h>#include <pthread.h>#include <sched.h>#include <signal.h>#include <stdint.h>#include <stdio.h>#include <stdlib.h>#include <string.h>#include <sys/epoll.h>#include <sys/reboot.h>#include <sys/time.h>#include <termios.h>#include <unistd.h>#include "CANopen.h"#include "CO_Linux_tasks.h"#include "CO_OD_storage.h"#include "CO_command.h"#include "CO_time.h"#include "ExoRobot.h"#include "ExoTestMachine.h"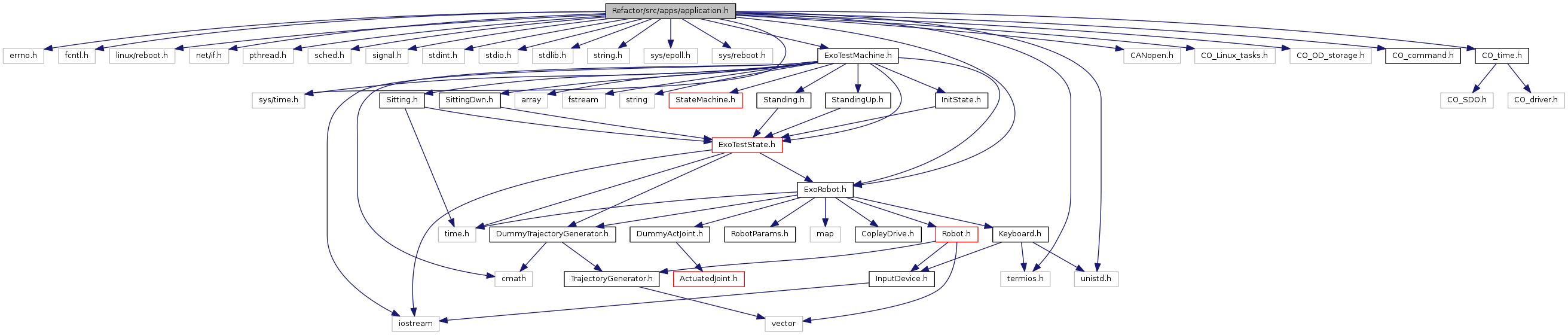
Go to the source code of this file.
Macros | |
| #define | NSEC_PER_SEC (1000000000) /* The number of nanoseconds per second. */ |
| #define | NSEC_PER_MSEC (1000000) /* The number of nanoseconds per millisecond. */ |
| #define | TMR_TASK_INTERVAL_NS (1000000) /* Interval of taskTmr in nanoseconds */ |
| #define | TMR_TASK_OVERFLOW_US (5000) /* Overflow detect limit for taskTmr in microseconds */ |
| #define | INCREMENT_1MS(var) (var++) /* Increment 1ms variable in taskTmr */ |
| #define | NODEID (100) |
| #define | CANMESSAGELENGTH (100) |
Functions | |
| void | app_programStart (void) |
| void | app_communicationReset (void) |
| void | app_programEnd (void) |
| void | app_programAsync (uint16_t timer1msDiff) |
| void | app_programControlLoop (void) |
| #define CANMESSAGELENGTH (100) |
Definition at line 66 of file application.h.
| #define INCREMENT_1MS | ( | var | ) | (var++) /* Increment 1ms variable in taskTmr */ |
Definition at line 64 of file application.h.
| #define NODEID (100) |
Definition at line 65 of file application.h.
| #define NSEC_PER_MSEC (1000000) /* The number of nanoseconds per millisecond. */ |
Definition at line 61 of file application.h.
| #define NSEC_PER_SEC (1000000000) /* The number of nanoseconds per second. */ |
Application interface for RobotCANControl main.
/file application.h /author William Campbell
This file is an adaptation of CANopenSocket, a Linux implementation of CANopen stack with master functionality. Project home page is https://github.com/CANopenNode/CANopenSocket. CANopenSocket is based on CANopenNode: https://github.com/CANopenNode/CANopenNode.
The adaptation is specifically designed for use with the RobotCANControl design stack and a multi limbed robot. It has been tested using a Beagle Bone black and the Fourier Intelligence X2 exoskelton in a lab testing setting.It can be addapted for use with other CANopen enabled linux based robotic projects.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License.
Definition at line 60 of file application.h.
| #define TMR_TASK_INTERVAL_NS (1000000) /* Interval of taskTmr in nanoseconds */ |
Definition at line 62 of file application.h.
| #define TMR_TASK_OVERFLOW_US (5000) /* Overflow detect limit for taskTmr in microseconds */ |
Definition at line 63 of file application.h.
| void app_communicationReset | ( | void | ) |
Function is called after CANopen communication reset.
Definition at line 25 of file application.cpp.
| void app_programAsync | ( | uint16_t | timer1msDiff | ) |
Function is called cyclically from main.
| timer1msDiff | Time difference since last call |
Definition at line 32 of file application.cpp.
| void app_programControlLoop | ( | void | ) |
Function is called cyclically from realtime thread at constant intervals.
Code inside this function must be executed fast. Take care on race conditions.
Definition at line 35 of file application.cpp.
| void app_programEnd | ( | void | ) |
Function is called just before program ends.
Definition at line 28 of file application.cpp.
| void app_programStart | ( | void | ) |
Function is called on program startup.
Definition at line 19 of file application.cpp.
 1.8.11
1.8.11

