|
Alex exoskeleton
ALEX SoftwareDocumentation
|
#include <time.h>#include <map>#include "CopleyDrive.h"#include "DummyActJoint.h"#include "DummyTrajectoryGenerator.h"#include "Keyboard.h"#include "Robot.h"#include "RobotParams.h"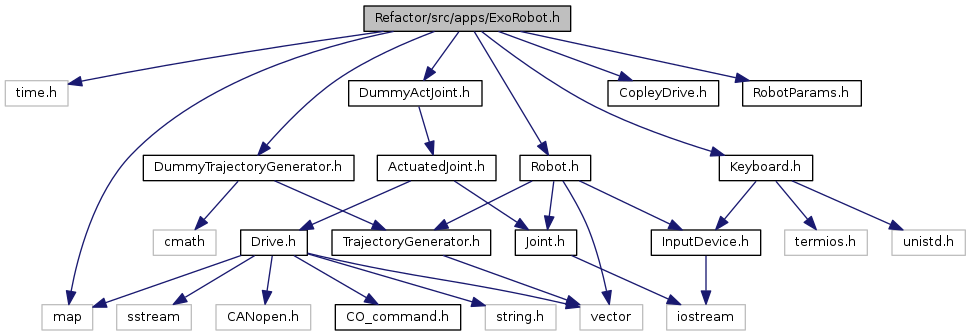
Go to the source code of this file.
Classes | |
| class | ExoRobot |
| Example implementation of the Robot class, representing an X2 Exoskeleton, using DummyActuatedJoint and DummyTrajectoryGenerator. More... | |
 1.8.11
1.8.11

