|
Alex exoskeleton
ALEX SoftwareDocumentation
|
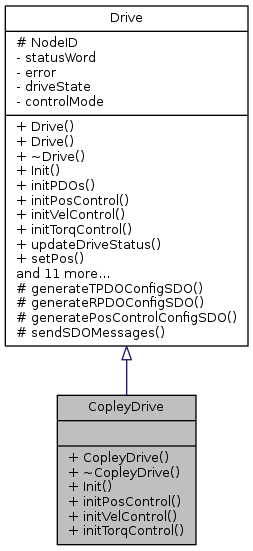
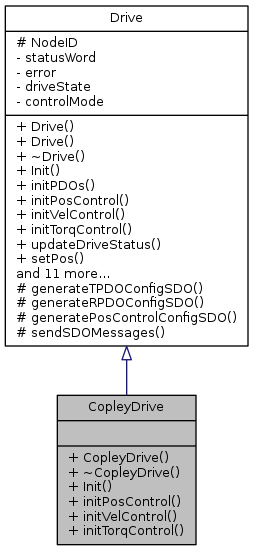
An implementation of the Drive Object, specifically for Copley-branded devices (currently used on the X2 Exoskeleton) More...
#include <CopleyDrive.h>
Public Member Functions | |
| CopleyDrive (int NodeID) | |
| Construct a new Copley Drive object. More... | |
| ~CopleyDrive () | |
| Destroy the Copley Drive object. More... | |
| bool | Init () |
| bool | initPosControl (motorProfile posControlMotorProfile) |
| bool | initVelControl () |
| bool | initTorqControl () |
 Public Member Functions inherited from Drive Public Member Functions inherited from Drive | |
| Drive () | |
| Construct a new Drive object. More... | |
| Drive (int NodeID) | |
| Construct a new Drive object. More... | |
| virtual | ~Drive () |
| Destroy the Drive object. More... | |
| virtual bool | initPDOs () |
| Initialises a standard set of PDOs for the use of the drive. These are: More... | |
| virtual int | updateDriveStatus () |
| virtual bool | setPos (int position) |
| virtual bool | setVel (int velocity) |
| virtual bool | setTorque (int torque) |
| virtual int | getPos () |
| virtual int | getVel () |
| virtual int | getTorque () |
| virtual bool | readyToSwitchOn () |
| Changes the state of the drive to "ready to switch on". More... | |
| virtual bool | enable () |
| Sets the state of the drive to "enabled". More... | |
| virtual bool | disable () |
| sets the state of the drive to "disabled" More... | |
| virtual bool | posControlConfirmSP () |
| Flips Bit 4 of Control Word (0x6041) - A new set point is only confirmed if the transition is from 0 to 1. More... | |
| virtual DriveState | getDriveState () |
| Get the current state of the drive. More... | |
| int | getNodeID () |
| Get returns the CanNode ID. More... | |
Additional Inherited Members | |
| Protected Member Functions inherited from Drive | |
| std::vector< std::string > | generateTPDOConfigSDO (std::vector< OD_Entry_t > items, int PDO_Num, int SyncRate) |
| Generates the list of commands required to configure TPDOs on the drives. More... | |
| std::vector< std::string > | generateRPDOConfigSDO (std::vector< OD_Entry_t > items, int PDO_Num, int UpdateTiming) |
| Generates the list of commands required to configure RPDOs on the drives. More... | |
| std::vector< std::string > | generatePosControlConfigSDO (motorProfile positionProfile) |
| Generates the list of commands required to configure Position control in CANopen motor drive. More... | |
| int | sendSDOMessages (std::vector< std::string > messages) |
| messages Properly formatted SDO Messages More... | |
| Protected Attributes inherited from Drive | |
| int | NodeID |
| The CAN Node ID used to address this particular drive on the CAN bus. More... | |
An implementation of the Drive Object, specifically for Copley-branded devices (currently used on the X2 Exoskeleton)
Definition at line 16 of file CopleyDrive.h.
| CopleyDrive::CopleyDrive | ( | int | NodeID | ) |
Construct a new Copley Drive object.
An implementation of the Drive Object, specifically for the Copley Drive.
| NodeID | CANopen Node ID |
Definition at line 11 of file CopleyDrive.cpp.
| CopleyDrive::~CopleyDrive | ( | ) |
Destroy the Copley Drive object.
Definition at line 14 of file CopleyDrive.cpp.
|
virtual |
Initialises the drive (SDO start message)
Implements Drive.
Definition at line 18 of file CopleyDrive.cpp.
|
virtual |
Sets the drive to Position control with default parameters (through SDO messages)
Note: Should be overloaded to allow parameters to be set
Implements Drive.
Definition at line 22 of file CopleyDrive.cpp.
|
virtual |
Sets the drive to Torque control with default parameters (through SDO messages)
Note: Should be overloaded to allow parameters to be set
Implements Drive.
Definition at line 35 of file CopleyDrive.cpp.
|
virtual |
Sets the drive to Velocity control with default parameters (through SDO messages)
Note: Should be overloaded to allow parameters to be set
Implements Drive.
Definition at line 31 of file CopleyDrive.cpp.
 1.8.11
1.8.11

