|
Alex exoskeleton
ALEX SoftwareDocumentation
|
#include "DummyTrajectoryGenerator.h"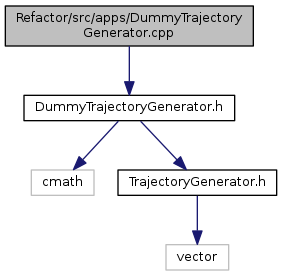
Go to the source code of this file.
Variables | |
| double | sitting [6] = {90, 90, 90, 90, 0, 0} |
| double | standing [6] = {180, 180, 0, 0, 0, 0} |
Definition in file DummyTrajectoryGenerator.cpp.
| double sitting[6] = {90, 90, 90, 90, 0, 0} |
Definition at line 14 of file DummyTrajectoryGenerator.cpp.
| double standing[6] = {180, 180, 0, 0, 0, 0} |
Definition at line 15 of file DummyTrajectoryGenerator.cpp.
 1.8.11
1.8.11

