|
Alex exoskeleton
ALEX SoftwareDocumentation
|
#include "CO_driver.h"#include "CO_SDO.h"#include "CO_SDOmaster.h"#include <pthread.h>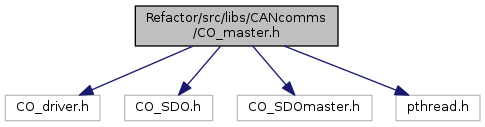
Go to the source code of this file.
Functions | |
| int | sdoClientUpload (CO_SDOclient_t *SDOclient, uint8_t nodeID, uint16_t idx, uint8_t subidx, uint8_t *dataRx, uint32_t dataRxSize, uint32_t *dataRxLen, uint32_t *SDOabortCode, uint16_t SDOtimeoutTime, uint8_t blockTransferEnable) |
| int | sdoClientDownload (CO_SDOclient_t *SDOclient, uint8_t nodeID, uint16_t idx, uint8_t subidx, uint8_t *dataTx, uint32_t dataTxLen, uint32_t *SDOabortCode, uint16_t SDOtimeoutTime, uint8_t blockTransferEnable) |
Variables | |
| pthread_mutex_t | CO_CAN_VALID_mtx |
| Testing ExoRobot new classes. More... | |
| volatile uint32_t | CO_timer1ms |
CANopen master functions
This file is part of CANopenSocket, a Linux implementation of CANopen stack with master functionality. Project home page is https://github.com/CANopenNode/CANopenSocket. CANopenSocket is based on CANopenNode: https://github.com/CANopenNode/CANopenNode.
CANopenSocket is free and open source software: you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation, either version 2 of the License, or (at your option) any later version.
This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details.
You should have received a copy of the GNU General Public License along with this program. If not, see http://www.gnu.org/licenses/.
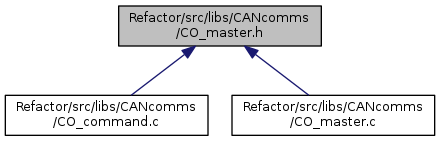
Definition in file CO_master.h.
| int sdoClientDownload | ( | CO_SDOclient_t * | SDOclient, |
| uint8_t | nodeID, | ||
| uint16_t | idx, | ||
| uint8_t | subidx, | ||
| uint8_t * | dataTx, | ||
| uint32_t | dataTxLen, | ||
| uint32_t * | SDOabortCode, | ||
| uint16_t | SDOtimeoutTime, | ||
| uint8_t | blockTransferEnable | ||
| ) |
Sdo client download.
For further details see CANopenNode/stack/CO_master.h file. This is blocking function.
| SDOclient | Pointer to CANopen SDO client object. |
| nodeID | Node-ID of the remote node. |
| idx | Index of object in object dictionary in remote node. |
| subidx | Subindex of object in object dictionary in remote node. |
| dataTx | Pointer to data buffer, which contains the data. |
| dataTxLen | Length of data in dataTx. |
| SDOabortCode | Return variable - SDO abort code. |
| SDOtimeoutTime | SDO timeout time in milliseconds. |
| blockTransferEnable | If true, try to initiate block transfer. |
Definition at line 96 of file CO_master.c.
| int sdoClientUpload | ( | CO_SDOclient_t * | SDOclient, |
| uint8_t | nodeID, | ||
| uint16_t | idx, | ||
| uint8_t | subidx, | ||
| uint8_t * | dataRx, | ||
| uint32_t | dataRxSize, | ||
| uint32_t * | dataRxLen, | ||
| uint32_t * | SDOabortCode, | ||
| uint16_t | SDOtimeoutTime, | ||
| uint8_t | blockTransferEnable | ||
| ) |
Sdo client upload.
For further details see CANopenNode/stack/CO_master.h file. This is blocking function.
| SDOclient | Pointer to CANopen SDO client object. |
| nodeID | Node-ID of the remote node. |
| idx | Index of object in object dictionary in remote node. |
| subidx | Subindex of object in object dictionary in remote node. |
| dataRx | Pointer to data buffer, into which received data will be written. |
| dataRxSize | Maximum size of dataRx. |
| dataRxLen | Return variable - actual data length in dataRx. |
| SDOabortCode | Return variable - SDO abort code. |
| SDOtimeoutTime | SDO timeout time in milliseconds. |
| blockTransferEnable | If true, try to initiate block transfer. |
Definition at line 32 of file CO_master.c.
| pthread_mutex_t CO_CAN_VALID_mtx |
 1.8.11
1.8.11

